Ao contrário da maioria dos robôs existentes, que dependem profundamente de mapas internos para se locomover, este robô usa visão e reinforcement learning.
Quando Ananye Agarwal levou o seu cão para passear subindo e descendo os degraus do parque perto da Carnegie Mellon University (EUA), outros cães pararam perplexos no meio do caminho para observar.
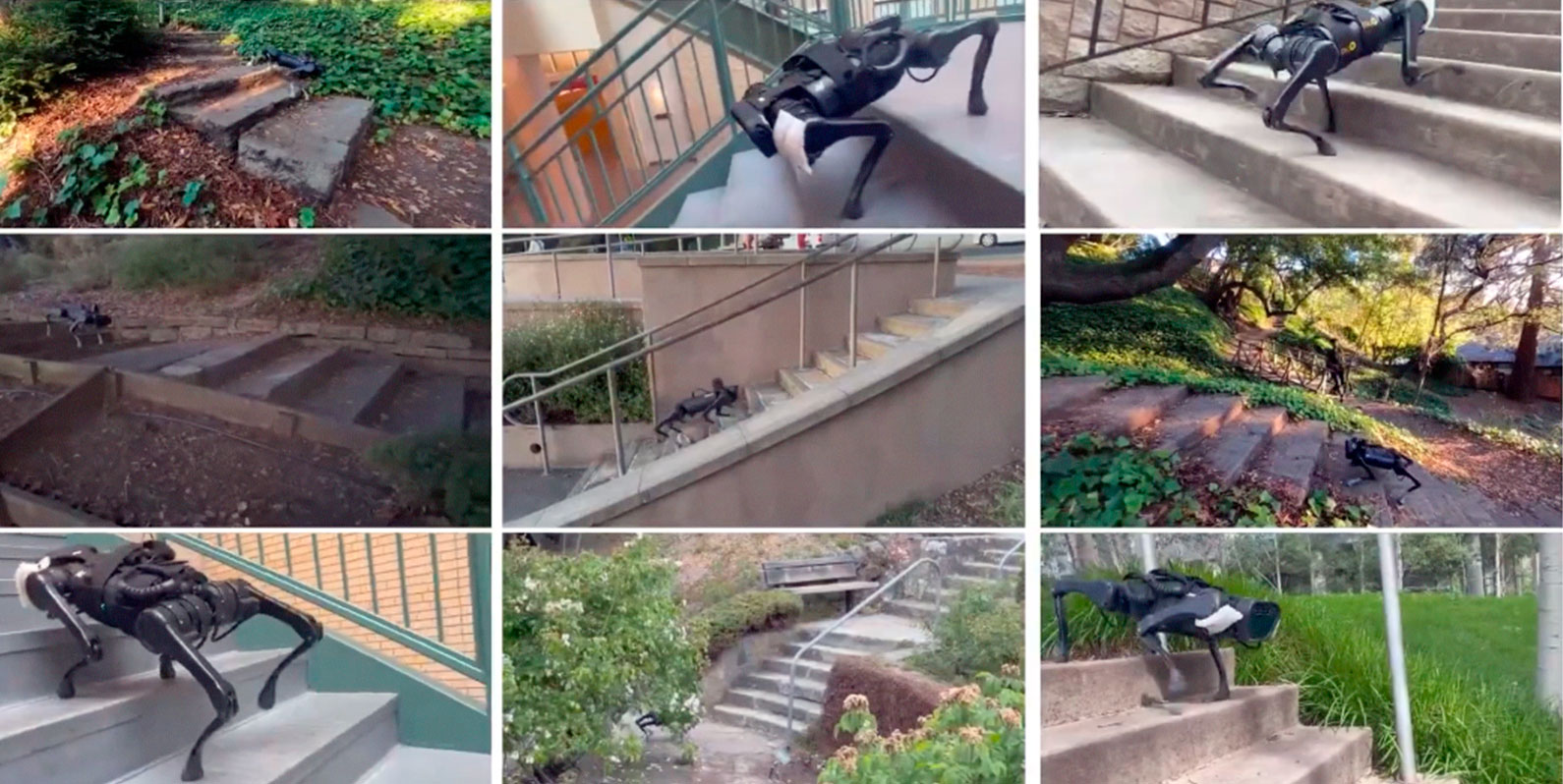
Isso porque o cão de Agarwal era um robô — e um bastante especial. Ao contrário de outros, que tendem a depender profundamente de um mapa interno para se locomover, o robô de Agarwal usa uma câmera embutida. Agarwal é estudante de doutoramento na Carnegie Mellon e faz parte de um grupo de investigadores responsáveis pelo desenvolvimento de uma técnica que permite que robôs caminhem em terrenos complicados usando visão computacional e reinforcement learning. Os investigadores esperam que o seu trabalho ajude a tornar mais fácil a utilização de robôs no mundo real.
Ao contrário dos robôs existentes no mercado, como o Spot da Boston Dynamics, que se move usando mapas internos, este usa apenas câmeras para guiar seus movimentos ao ar livre, diz Ashish Kumar, aluno de pós-graduação da UC Berkeley (EUA), que é um dos autores de um artigo que descreve o trabalho e que deve ser apresentado na Conference on Robot Learning, em dezembro. Outras tentativas de usar sugestões de câmeras para guiar o movimento do robô foram limitadas a terrenos planos, mas dessa vez eles conseguiram fazer com que a máquina subisse escadas, escalasse pedras e pulasse buracos.
O robô de quatro patas é treinado primeiro num simulador para se movimentar em diferentes ambientes. Assim, consegue ter uma ideia geral de como é caminhar em um parque ou subir e descer escadas. Quando colocado no mundo real, o seu movimento é guiado por imagens captadas de uma única câmera na frente do robô. Aprende a ajustar o seu passo para transpassar coisas como escadas e terrenos irregulares usando o reinforcement learning, uma técnica de Inteligência Artificial (IA) que permite que os sistemas se aprimorem por meio de tentativa e erro.
Eliminar a necessidade de um mapa interno torna o robô mais eficiente já que tira dele a possibilidade de se limitar por possíveis equívocos em um mapa, diz Deepak Pathak, professor assistente da Carnegie Mellon, membro da equipe de Agarwal.
É extremamente difícil para um robô traduzir pixels brutos de uma câmera para o tipo de movimento preciso e equilibrado necessário para navegar ao seu redor, diz Jie Tan, cientista investigador do Google, que não participou do estudo. Diz que é a primeira vez que vê um robô pequeno e de baixo custo demonstrar uma mobilidade tão impressionante.
A equipe alcançou um “avanço no aprendizado e autonomia de robôs”, diz Guanya Shi, investigador da Universidade de Washington (EUA) que estuda machine learning e controlo robótico, que também não participou da pesquisa.
Akshara Rai, uma cientista investigadora da Facebook AI Research, que trabalha com machine learning e robótica, e não esteve envolvida neste trabalho, concorda.
“É um passo promissor para construir robôs, com pernas, perceptivos do mundo ao seu redor e implantá-los na natureza”, diz Rai.
No entanto, de acordo com Rai, embora o trabalho da equipa seja útil para melhorar a forma como o robô anda, isso não o ajudará a descobrir para onde ir com antecedência. “A navegação é importante para implantar robôs no mundo real”, complementa.
Mais trabalho é necessário antes que o cão-robô seja capaz de passear pelos parques ou buscar coisas em casa. Embora possa entender a profundidade por meio de sua câmera frontal, não consegue lidar com situações como terreno escorregadio ou grama alta, diz Tan. Pode pisar em poças ou ficar preso na lama.